
printf("ho_tari\n");
ep.30 딥러닝개론4 본문
2024.8.19



import numpy as np
import matplotlib.pyplot as plt
x_data = [1.0, 2.0, 3.0]
y_data = [2.0, 4.0, 6.0]
w = 1.0
def forward(x):
return x * w
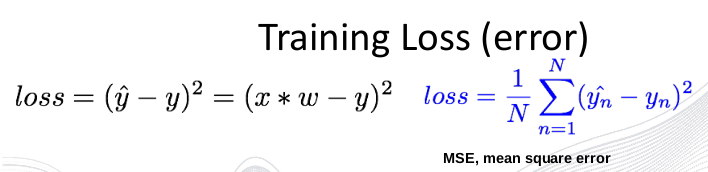
def loss(x, y):
y_pred = forward(x)
return (y_pred - y) * (y_pred - y)
w_list = []
mse_list = []
for w in np.arange(0.0, 4.1, 0.1):
print("w=", w)
l_sum = 0
for x_val, y_val in zip(x_data, y_data):
y_pred_val = forward(x_val)
l = loss(x_val, y_val)
l_sum =+ l
print("\t", x_val, y_val, y_pred_val, l)
print("MSE=", l_sum / 3)
w_list.append(w)
mse_list.append(l_sum / 3)
plt.plot(w_list, mse_list)
plt.ylabel('Loss')
plt.xlabel('w')
plt.show()


x_data = [1.0, 2.0, 3.0]
y_data = [2.0, 4.0, 6.0]
w = 1.0
def forward(x):
return x * w
def loss(x, y):
y_pred = forward(x)
return (y_pred - y) * (y_pred - y)
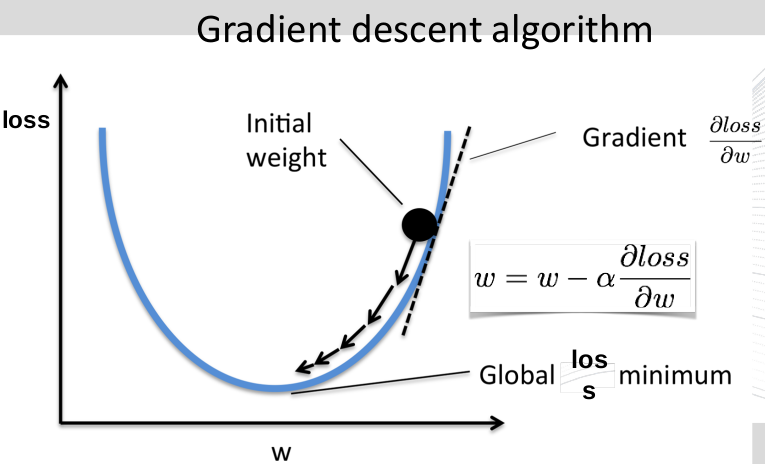
def gradient(x, y):
return 2 * x * (x * w - y)
print("predict (before training)", 4, forward(4))
for epoch in range(100):
for x_val, y_val in zip(x_data, y_data):
grad = gradient(x_val, y_val)
w = w - 0.01 * grad
print("\tgrad: ", x_val, y_val, grad)
l = loss(x_val, y_val)
print("progress:", epoch, "w=", w, "loss=", l)
print("predict (after training)", "4 hours", forward(4))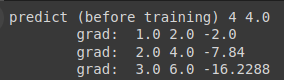



import torch
from torch.autograd import Variable
x_data = [1.0, 2.0, 3.0]
y_data = [2.0, 4.0, 6.0]
w = Variable(torch.Tensor([1.0]), requires_grad=True)
x = Variable(torch.randn(1, 10))
prev_h = Variable(torch.randn(1, 20))
W_h = Variable(torch.randn(20, 20))
W_x = Variable(torch.randn(20, 10))
def forward(x):
return x * w
def loss(x, y):
y_pred = forward(x)
return (y_pred - y) * (y_pred - y)
print("predict (before training)", 4, forward(4).data[0])
for epoch in range(10):
for x_val, y_val in zip(x_data, y_data):
l = loss(x_val, y_val)
l.backward()
print("\tgrad: ", x_val, y_val, w.grad.data[0])
w.data = w.data - 0.01 * w.grad.data
w.grad.data.zero_()
print("progress:", epoch, l.data[0])
print("predict (after training)", 4, forward(4).data[0])
'(두산로보틱스) ROKEY 부트 캠프 > Computer Vision 교육' 카테고리의 다른 글
| ep.32 딥러닝개론6 (0) | 2024.08.21 |
|---|---|
| ep.31 딥러닝개론5 (0) | 2024.08.20 |
| ep.29 딥러닝개론3 (0) | 2024.08.16 |
| ep.28 딥러닝개론2 (0) | 2024.08.14 |
| ep.27 딥러닝개론1 (0) | 2024.08.13 |
'(두산로보틱스) ROKEY 부트 캠프/Computer Vision 교육' Related Articles
more



