
printf("ho_tari\n");
Chapter7 : 필터링 본문
<OpenCV_Projects.cpp>
#include <opencv2/opencv.hpp>
extern void filter_embossing();
extern void filter_blurring();
extern void filter_gaussian();
extern void filter_unsharp_mask();
int main()
{
std::cout << CV_VERSION << std::endl;
//filter_embossing();
//filter_blurring();
//filter_gaussian();
filter_unsharp_mask();
}
<filter_embossing.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void filter_embossing()
{
cv::Mat src = cv::imread("rose.bmp", cv::IMREAD_GRAYSCALE);
if (src.empty()) return;
float filter_data[] = { -1.0f, -1.0f, 0.0f, -1.0f, 0.0f, 1.0f, 0.0f, 1.0f, 1.0f };
cv::Mat emboss_kernel(3, 3, CV_32FC1, filter_data);
cv::Mat dst;
cv::filter2D(src, dst, -1, emboss_kernel, cv::Point(-1, -1), 120 /*좀 더 밝게*/);
cv::imshow("SRC", src);
cv::imshow("DST", dst);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>

<filter_blurring.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void filter_blurring()
{
cv::Mat src = cv::imread("rose.bmp", cv::IMREAD_GRAYSCALE);
if (src.empty()) return;
cv::Mat dst1;
cv::Mat dst3;
float blur_filter[] = { 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f, 1 / 9.f };
cv::Mat dst2(3, 3, CV_32FC1, blur_filter); // 3 x 3 평균값 필터
cv::filter2D(src, dst1, -1, dst2, cv::Point(-1, -1), 0);
cv::imshow("SRC", src);
cv::imshow("DST1", dst1);
cv::waitKey();
for (int ksize = 3; ksize <= 7; ksize += 2)
{
cv::blur(src, dst3, cv::Size(ksize, ksize));
cv::String desc = cv::format("Blur : %d X %d", ksize, ksize);
cv::putText(dst3, desc, cv::Point(10, 30), cv::FONT_HERSHEY_SIMPLEX, 1.0, cv::Scalar(255), 1, cv::LINE_AA);
cv::imshow("DST3", dst3);
cv::waitKey();
}
cv::destroyAllWindows();
}<compile 결과>

키보드 아무키를 누르면 블러가 점점 심해진다


<filter_gaussian.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void filter_gaussian()
{
cv::Mat src = cv::imread("rose.bmp", cv::IMREAD_GRAYSCALE);
if (src.empty()) return;
cv::Mat dst;
for (int sigma = 1; sigma <= 5; ++sigma)
{
cv::GaussianBlur(src, dst, cv::Size(), static_cast<double>(sigma));
cv::String text = cv::format("Sigma : %d", sigma);
cv::putText(dst, text, cv::Point(10, 30), cv::FONT_HERSHEY_PLAIN, 1.0, cv::Scalar(255), 1, cv::LINE_AA);
cv::imshow(text, dst);
cv::waitKey();
}
cv::destroyAllWindows();
}<compile 결과>

<filter_unsharp_mask.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void filter_unsharp_mask()
{
cv::Mat src = cv::imread("rose.bmp", cv::IMREAD_GRAYSCALE);
if (src.empty()) return;
cv::imshow("SRC", src);
cv::Mat blurred;
float alpha = 1.0f;
for (int sigma = 1; sigma <= 5; ++sigma)
{
cv::GaussianBlur(src, blurred, cv::Size(), sigma);
cv::Mat dst = (1 + alpha) * src - (alpha * blurred);
cv::String text = cv::format("Sigma : %d", sigma);
cv::putText(dst, text, cv::Point(10, 30), cv::FONT_HERSHEY_SIMPLEX, 1.0, cv::Scalar(255), 1, cv::LINE_AA);
cv::imshow(text, dst);
cv::waitKey();
}
cv::destroyAllWindows();
}<compile 결과>

<noise_gaussian.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//가우시안 잡음 추가 함수
void noise_gaussian()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat dst;
for (int stddev = 10; stddev <= 30; stddev += 10)
{
Mat noise(src.size(), CV_32FC1);
randn(noise, 0, stddev); //평균이 0이고 표준편차는 10부터 30이하의 값
add(src, noise, dst, noArray(), CV_8UC1);
String text = format("stddev = %d", stddev);
putText(dst, text, Point(10, 30), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255), 1, LINE_AA);
imshow("DST", dst);
waitKey();
}
destroyAllWindows();
}<compile 결과>


<filter_bilateral.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//양방향 필터 함수
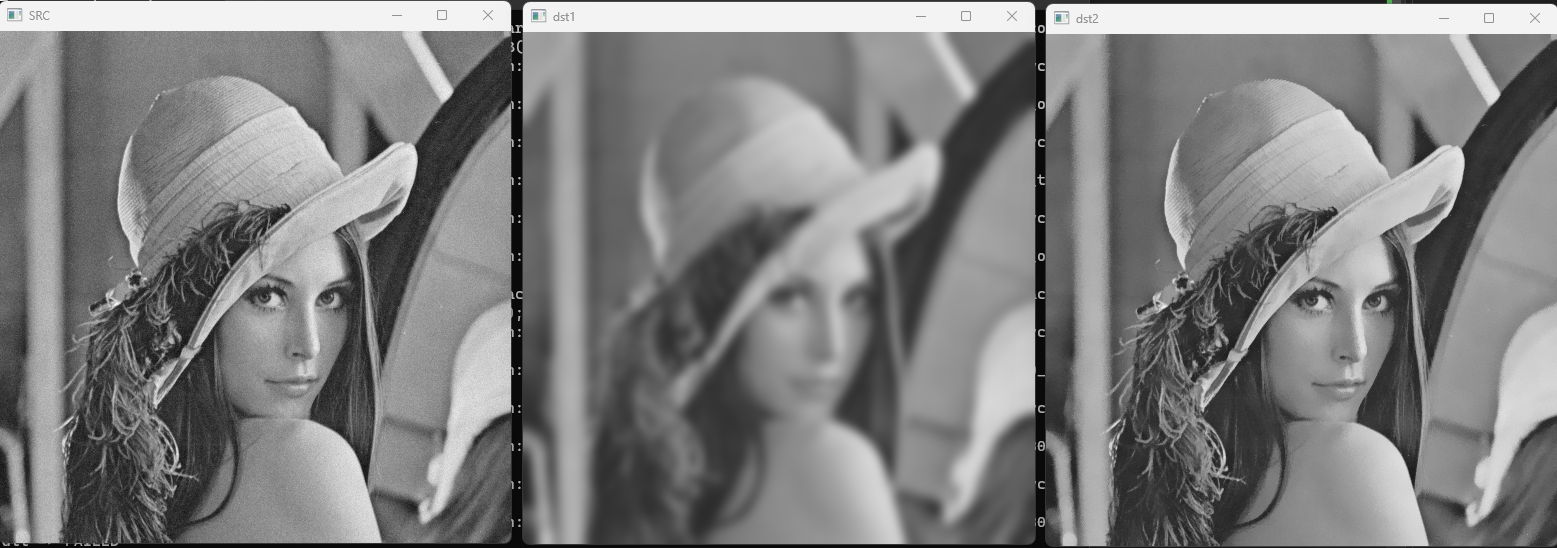
void filter_bilateral()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat noise(src.size(), CV_32SC1);
randn(noise, 0, 5); //평균 0, 표준편차 5
add(src, noise, src, Mat(), CV_8U);
Mat dst1;
GaussianBlur(src, dst1, Size(), 5); //gaussian blur를 사용하면 주로엣지부분이 필터링된다. (sigma5)
Mat dst2;
bilateralFilter(src, dst2, -1 /* 이웃 픽셀과의 거리를 자동으로 잡아준다. */, 10, 5); //bilateral Filter을 사용하면 엣지를 제외한 나머지부분이 주로 필터링된다.
imshow("SRC", src);
imshow("dst1", dst1);
imshow("dst2", dst2);
waitKey();
destroyAllWindows();
}<compile 결과>
<filter_median.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//미디언 필터 함수
void filter_median()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) return;
//salt & pepper 노이즈 방식
int num = (int)(src.total() * 0.1);
for (int i = 0; i < num; i++)
{
int x = rand() % src.cols;
int y = rand() % src.rows;
src.at<uchar>(y, x) = (i % 2) * 255; // 짝수이면 검은점, 홀수이면 흰점
}
Mat dst1;
GaussianBlur(src, dst1, Size(), 1);
Mat dst2;
medianBlur(src, dst2, 3);
imshow("SRC", src); // 원본에 salt & pepper이 추가된 이미지
imshow("dst1", dst1); // gaussian blur 가 적용된 이미지
imshow("dst2", dst2); // median blur가 적용된 이미지
waitKey();
destroyAllWindows();
}<compile 결과>

'OpenCV' 카테고리의 다른 글
| Chapter 9 : 에지 검출과 응용 (0) | 2023.09.18 |
|---|---|
| Chapter 8 : 영상의 기하학적 변환 (0) | 2023.09.18 |
| Chapter6 : 영상의 산술 및 논리 연산 (0) | 2023.09.14 |
| Chapter5 : 영상의 밝기와 명암비 조절 (0) | 2023.09.14 |
| Chpater 4 : 이미지와 동영상 파일 다루기, 직선 그리기, 문자열 출력하기, 키보드 이벤트 처리하기, 마우스 이벤트 처리하기, 트랙바 사용하기, 마스크 연산, 연산 시간 측정, 여러 수치 측정 함수 (4) | 2023.09.13 |
'OpenCV' Related Articles
more



