
printf("ho_tari\n");
Chapter 9 : 에지 검출과 응용 본문
<OpenCV_Projects.cpp>
#include <opencv2/opencv.hpp>
using namespace std;
extern void sobel_edge();
extern void canny_edge();
extern void hough_lines();
extern void hough_circles();
int main()
{
//sobel_edge();
//canny_edge();
//hough_lines();
hough_circles();
}
<sobel_edge.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
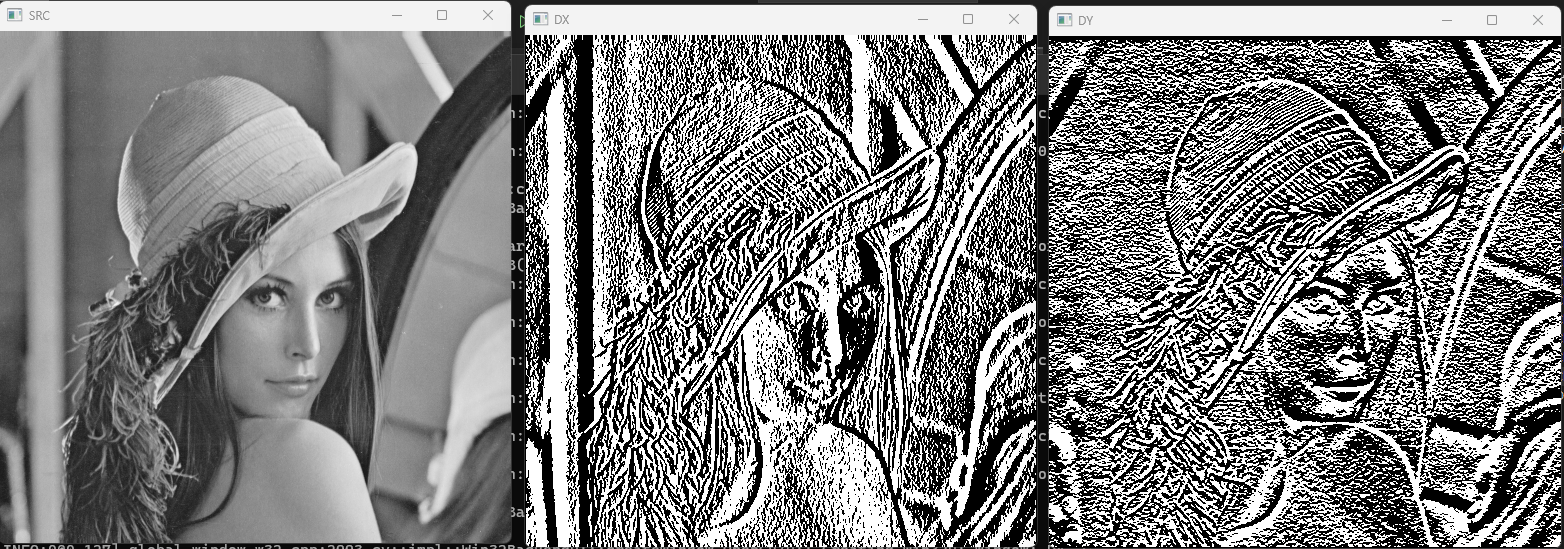
//소벨마스크 기준 에지 검출 함수
void sobel_edge()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat dx;
Mat dy;
Sobel(src, dx, CV_32FC1, 1, 0); // X로 미분
Sobel(src, dy, CV_32FC1, 0, 1); // Y로 미분
imshow("SRC", src);
imshow("DX", dx);
imshow("DY", dy);
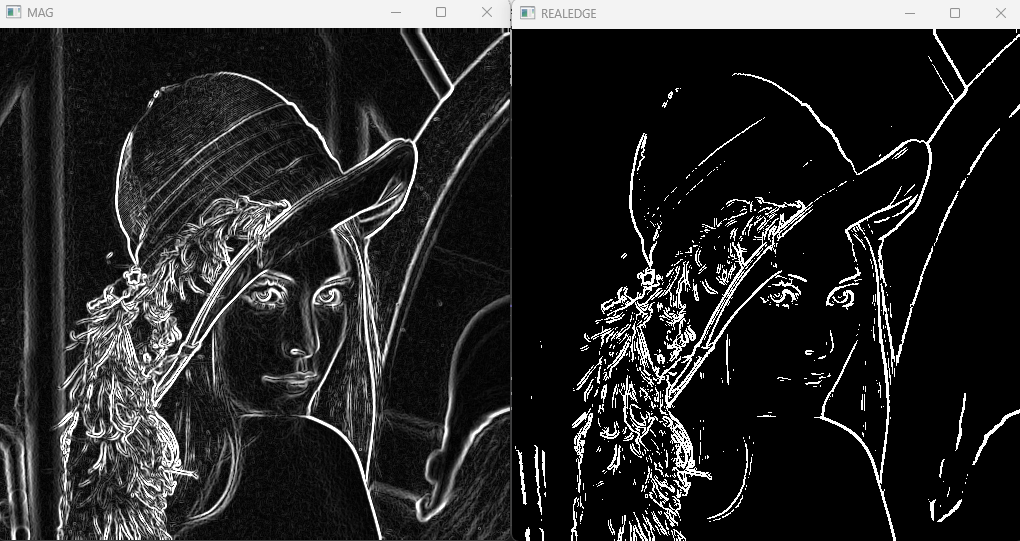
Mat mag;
magnitude(dx, dy, mag);
// c++ float -> imshow (opencv data)
mag.convertTo(mag, CV_8UC1);
imshow("MAG", mag);
Mat real_edge = mag > 150;
imshow("REALEDGE", real_edge);
waitKey();
destroyAllWindows();
}<compile 결과>
<canny_edge.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
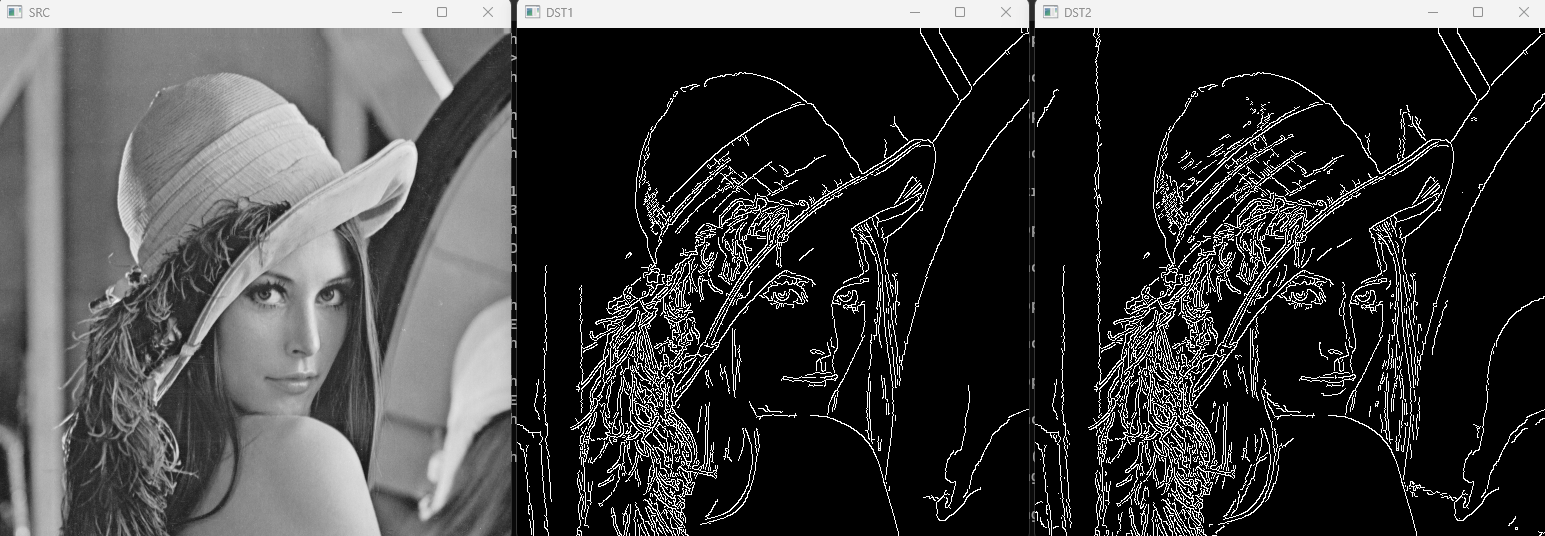
//캐니 에지 검출 함수
void canny_edge()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat dst1;
Mat dst2;
Canny(src, dst1, 50, 150, 3/*기본값*/, true);
Canny(src, dst2, 50, 100, 3/*기본값*/, true);
imshow("SRC", src);
imshow("DST1", dst1);
imshow("DST2", dst2);
waitKey();
destroyAllWindows();
}<compile 결과>
<hough_lines.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
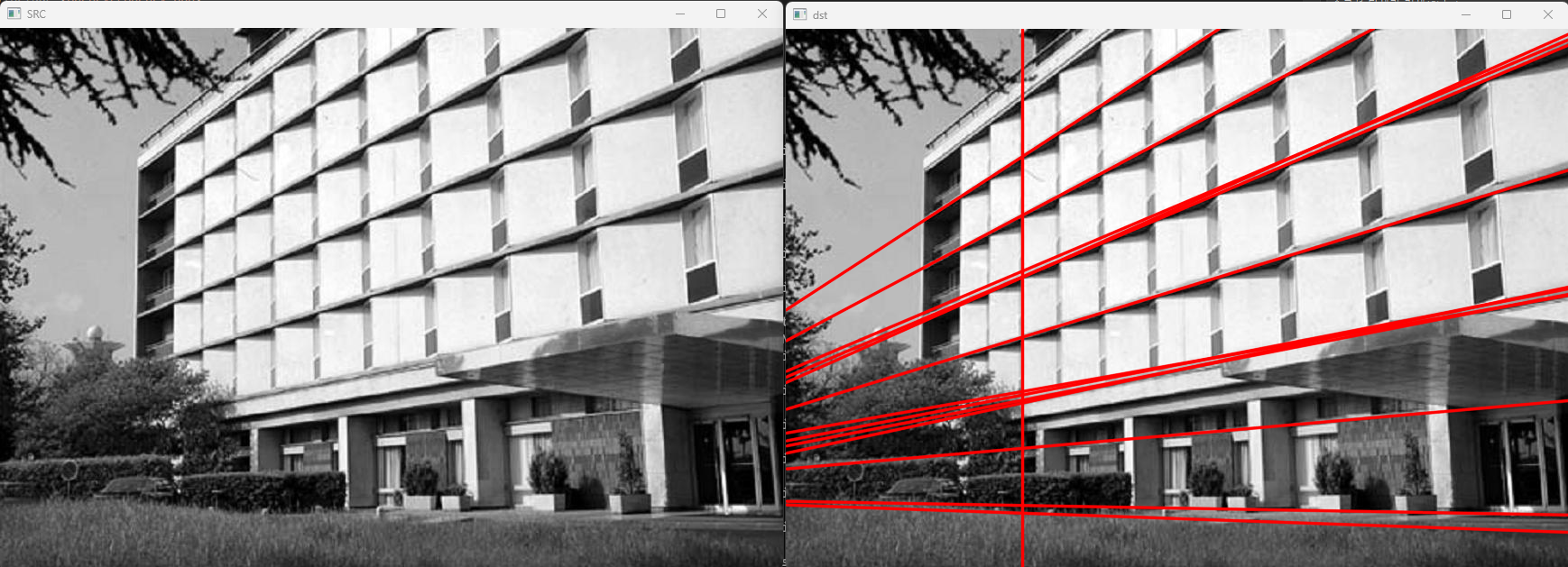
//허프 변환 직선 검출함수
void hough_lines()
{
Mat src = imread("building.jpg", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat edge;
Canny(src, edge, 50, 150); // 캐니 에지 통과
vector<Vec2f>lines;
HoughLines(edge, lines, 1.0, CV_PI / 180, 250/*기본값*/); //검출을 자세히 하려면 250에서 값을 더 줄이면 된다.
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR); // channel -> 3channel (칼라는 아님)
for (int i = 0; i < lines.size(); ++i)
{
float r = lines[i][0];
float t = lines[i][1];
double cos_t = cos(t);
double sin_t = sin(t);
double x0 = r * cos_t;
double y0 = r * sin_t;
double alpha = 1000;
Point pt1(cvRound(x0 + alpha * (-sin_t)), cvRound(y0 + alpha * cos_t));
Point pt2(cvRound(x0 - alpha * (-sin_t)), cvRound(y0 - alpha * cos_t));
line(dst, pt1, pt2, Scalar(0, 0, 255), 2, LINE_AA);
}
imshow("SRC", src);
imshow("dst", dst);
waitKey();
destroyAllWindows();
}<compile 결과>
<hough_circles.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//허프변환 - 원검출 함수
void hough_circles()
{
Mat src = imread("coins.png", IMREAD_GRAYSCALE);
if (src.empty()) return;
Mat blurred; // 노이즈 제거 용도 (미세한 픽셀 -> 원으로 인식할 수 있기 때문에)
blur(src, blurred, Size(3, 3));
vector<Vec3f>circles;
HoughCircles(blurred, circles, HOUGH_GRADIENT, 1, 50, 150, 125);
//두 원의 중심점 거리가 50픽셀보다 작으면 검출 x, 캐니 에지 검출기의 높은 임계값은 150으로 지정. 축적 배열 원소 값이 125보다 크면 원의 중심점으로 선택
//검출된 원의 중심좌표와 반지름 정보는 circles 변수에 저장
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR);
for (Vec3f c : circles)
{
Point center(cvRound(c[0]), cvRound(c[1]));
int radius = cvRound(c[2]);
circle(dst, center, radius, Scalar(0, 0, 255), 2, LINE_AA);
}
imshow("SRC", src);
imshow("DST", dst);
waitKey();
destroyAllWindows();
}<compile 결과>

'OpenCV' 카테고리의 다른 글
| Chapter 11 : 이진화와 모폴로지 (0) | 2023.09.18 |
|---|---|
| Chapter 10 : 컬러 영상 처리 (0) | 2023.09.18 |
| Chapter 8 : 영상의 기하학적 변환 (0) | 2023.09.18 |
| Chapter7 : 필터링 (0) | 2023.09.14 |
| Chapter6 : 영상의 산술 및 논리 연산 (0) | 2023.09.14 |
'OpenCV' Related Articles
more



