
printf("ho_tari\n");
Chpater 4 : 이미지와 동영상 파일 다루기, 직선 그리기, 문자열 출력하기, 키보드 이벤트 처리하기, 마우스 이벤트 처리하기, 트랙바 사용하기, 마스크 연산, 연산 시간 측정, 여러 수치 측정 함수 본문
OpenCV
Chpater 4 : 이미지와 동영상 파일 다루기, 직선 그리기, 문자열 출력하기, 키보드 이벤트 처리하기, 마우스 이벤트 처리하기, 트랙바 사용하기, 마스크 연산, 연산 시간 측정, 여러 수치 측정 함수
호타리 2023. 9. 13. 11:05<OpenCV_Projects.cpp>
#include <opencv2/opencv.hpp>
extern void show_camera();
extern void show_movie();
extern void show_video_record();
extern void show_draw_lines();
extern void show_draw_polygons();
extern void show_draw_text();
extern void keyboard_event();
extern void mouse_event();
extern void trackbar_event();
extern void mask_setTo();
extern void mask_copyTo();
extern void time_inverse();
extern void useful_function();
int main()
{
std::cout << CV_VERSION << std::endl;
//show_camera();
//show_movie();
//show_video_record();
//show_draw_lines();
//show_draw_polygons();
//show_draw_text();
//keyboard_event();
//mouse_event();
//trackbar_event();
//mask_setTo();
//mask_copyTo();
//time_inverse();
useful_function();
}
<show_camera.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void show_camera()
{
cv::VideoCapture cap(1); // index ( 0 = 첫번째, 1 = 두번째) (노트북 사용시 노트북 카메라 = 0, 외부 카메라 = 1)
if (cap.isOpened())
{
std::cout << "연결이 되었습니다." << std::endl;
}
else
{
std::cout << "카메라 연결 문제 발생." << std::endl;
return;
}
std::cout << "Frame width : " << cvRound(cap.get(cv::CAP_PROP_FRAME_WIDTH)) << std::endl; //cvRound : 소수점 제거 (정수로 출력)
std::cout << "Frame height : " << cvRound(cap.get(cv::CAP_PROP_FRAME_HEIGHT)) << std::endl;
cv::Mat frame;
cv::Mat inversed_frame;
cv::namedWindow("FRAME", cv::WINDOW_NORMAL);
cv::namedWindow("INVERSE", cv::WINDOW_NORMAL);
while (true)
{
cap >> frame; // frame에 cap 입력
if (frame.empty())
break;
inversed_frame = ~frame; //비트반전
imshow("FRAME", frame);
imshow("INVERSE", inversed_frame);
if (cv::waitKey(10) == 27)
break; // 27 -> ESC
}
cv::destroyAllWindows();
}<compile 결과>

<show_movie.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void show_movie()
{
cv::VideoCapture cap("stopwatch.avi");
if (cap.isOpened())
{
std::cout << "동영상이 연결 되었습니다." << std::endl;
}
else
{
std::cout << "동영상 파일이 없습니다." << std::endl;
return;
}
std::cout << cvRound(cap.get(cv::CAP_PROP_FRAME_WIDTH)) << std::endl;
std::cout << cvRound(cap.get(cv::CAP_PROP_FRAME_HEIGHT)) << std::endl;
double fps = cap.get(cv::CAP_PROP_FPS); // 영상의 프레임 출력
std::cout << "FPS : " << fps << std::endl;
int delay = cvRound(1'000 / fps);
cv::namedWindow("STOPWATCH", cv::WINDOW_NORMAL);
cv::namedWindow("INVERSE", cv::WINDOW_NORMAL);
cv::Mat frame;
while (true)
{
cap >> frame; // frame에 cap 입력
if (frame.empty()) break;
cv::imshow("STOPWATCH", frame);
cv::imshow("INVERSE", ~frame);
cv::waitKey(delay);
}
cv::destroyAllWindows();
}<compile 결과>

<show_video_record.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void show_video_record()
{
cv::VideoCapture cap(0);
if (cap.isOpened())
{
std::cout << "카메라가 정상적으로 연결 되었습니다." << std::endl;
}
else
{
std::cout << "카메라 문제 발생" << std::endl;
return;
}
double fps = cvRound(cap.get(cv::CAP_PROP_FPS));
int delay = cvRound(1000 / fps);
int fourcc = cv::VideoWriter::fourcc('X', '2', '6', '4');
cv::Mat frame;
cv::Mat inversed;
cv::VideoWriter output("Recording1.mp4", fourcc, 30, cv::Size(cap.get(cv::CAP_PROP_FRAME_WIDTH), cap.get(cv::CAP_PROP_FRAME_HEIGHT)));
if (output.isOpened())
{
std::cout << "녹화 준비가 되었습니다." << std::endl;
}
else
{
std::cerr << "녹화 문제 발생" << std::endl;
return;
}
cv::namedWindow("RECORDING");
cv::namedWindow("INVERSE");
while (true)
{
cap >> frame;
if (frame.empty()) break;
inversed = ~frame;
output << inversed; // 영상을 저장
cv::imshow("RECORDING", frame);
cv::imshow("INVERSE", inversed);
if (cv::waitKey(30) == 27) break;
}
cv::destroyAllWindows();
}<compile 결과>


<show_draw_lines.cpp>
#pragma once
#include <opencv2/opencv.hpp>
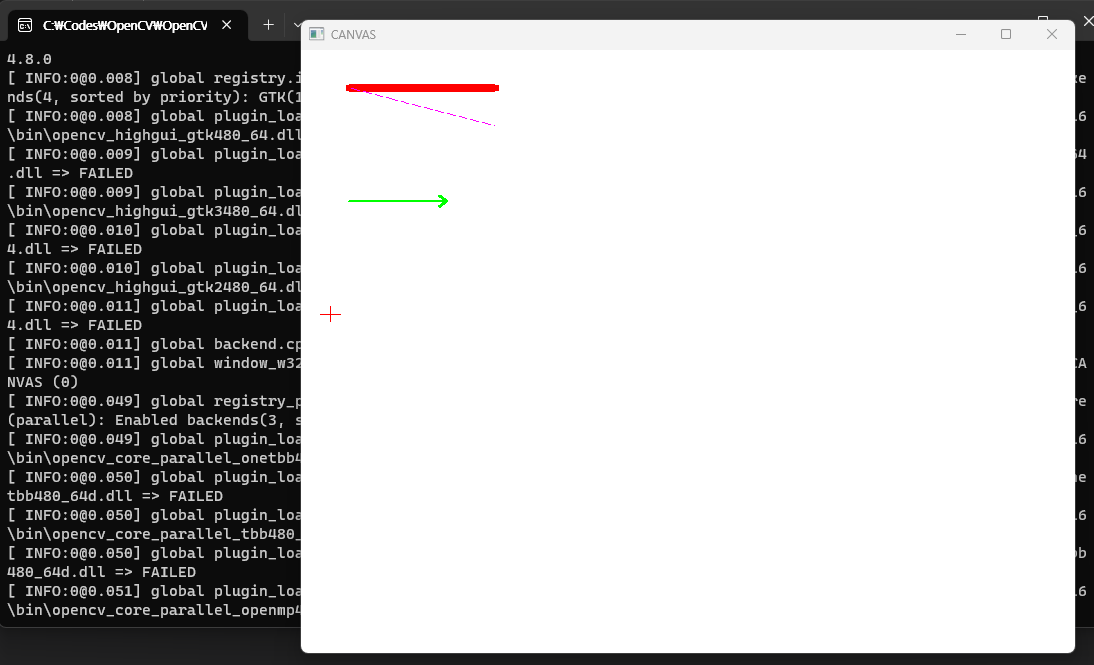
void show_draw_lines()
{
cv::Mat canvas(800, 800, CV_8UC3, cv::Scalar(255, 255, 255));
cv::line(canvas, cv::Point(50, 50), cv::Point(200, 50), cv::Scalar(0, 0, 255), 10);
cv::line(canvas, cv::Point(50, 50), cv::Point(200, 100), cv::Scalar(255, 0, 255));
cv::arrowedLine(canvas, cv::Point(50, 200), cv::Point(150, 200), cv::Scalar(0, 255, 0), 2);
cv::drawMarker(canvas, cv::Point(30, 350), cv::Scalar(0, 0, 255), cv::MARKER_CROSS);
cv::namedWindow("CANVAS", cv::WINDOW_NORMAL);
cv::imshow("CANVAS", canvas);
cv::waitKey();
cv::destroyWindow("CANVAS");
}<compile 결과>
<show_draw_polygons.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void show_draw_polygons()
{
cv::Mat canvas = cv::Mat(500, 500, CV_8UC3, cv::Scalar(255, 255, 255));
cv::rectangle(canvas, cv::Rect(50, 50, 150, 50), cv::Scalar(0, 0, 255), 3);
cv::rectangle(canvas, cv::Rect(50, 150, 100, 50), cv::Scalar(0, 0, 255), -1);
cv::circle(canvas, cv::Point(300, 120), 60, cv::Scalar(255, 255, 0), -1, cv::LINE_AA);
cv::ellipse(canvas, cv::Point(120, 300), cv::Size(60, 30), 20, 0, 270, cv::Scalar(0, 255, 0), -1, cv::LINE_AA);
std::vector<cv::Point> points;
points.push_back(cv::Point(250, 250));
points.push_back(cv::Point(300, 250));
points.push_back(cv::Point(300, 300));
points.push_back(cv::Point(350, 300));
points.push_back(cv::Point(350, 350));
points.push_back(cv::Point(250, 350));
cv::polylines(canvas, points, true, cv::Scalar(255, 0, 255), 5, -1);
cv::namedWindow("CANVAS", cv::WINDOW_NORMAL);
cv::imshow("CANVAS", canvas);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>

<show_draw_text.cpp>
#pragma once
#include <opencv2/opencv.hpp>
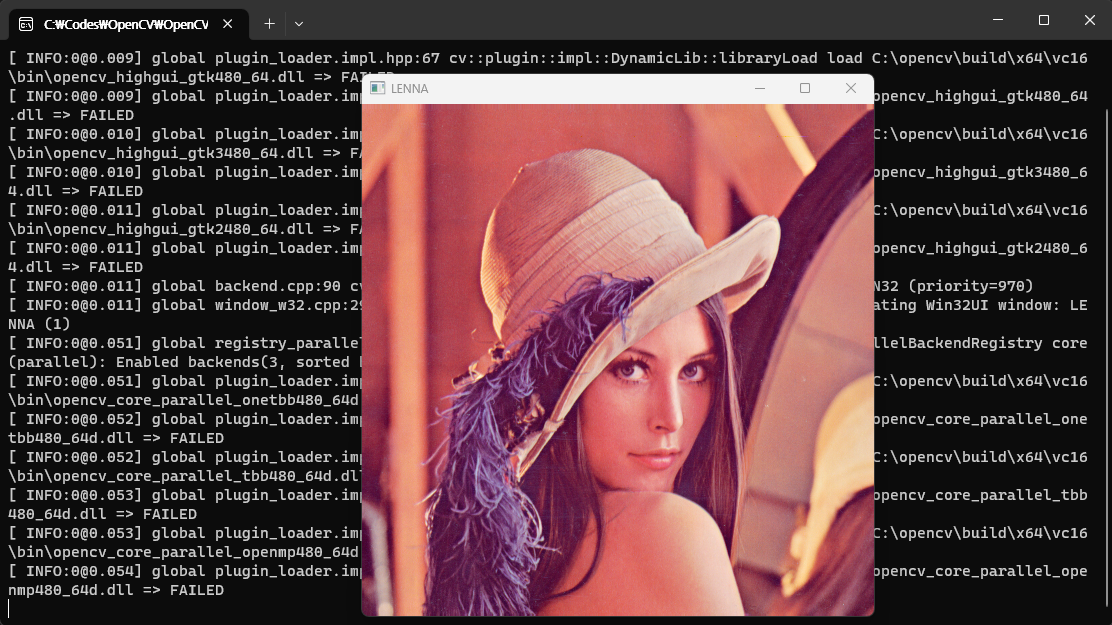
void show_draw_text()
{
cv::Mat canvas = cv::imread("lenna.bmp");
cv::putText(canvas, "LENNA", cv::Point(200, 450), cv::FONT_HERSHEY_TRIPLEX | cv::FONT_ITALIC, 2, cv::Scalar(255, 0, 0),5 , -1);
cv::namedWindow("LENNA", cv::WINDOW_NORMAL);
cv::imshow("LENNA", canvas);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>

<keyboard_event.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void keyboard_event()
{
cv::Mat img = cv::imread("lenna.bmp");
if (img.empty()) return;
cv::imshow("LENNA", img);
while (true)
{
int key_value = cv::waitKey(0);
if (key_value == 'I' or key_value == 'i')
{
img = ~img;
cv::imshow("LENNA", img);
}
else
{
if (key_value == 27 or key_value == 'Q' or key_value == 'q') break;
}
}
cv::destroyAllWindows();
}
<compile 결과>
<키보드 'i' 키를 눌렀을 때>

<mouse_event.cpp>
#pragma once
#include <opencv2/opencv.hpp>
static void on_mouse(int, int, int, int, void*);
static cv::Mat img;
static cv::Point pt_old;
void mouse_event()
{
img = cv::imread("lenna.bmp");
if (img.empty()) return;
cv::namedWindow("LENNA", cv::WINDOW_NORMAL);
cv::setMouseCallback("LENNA", on_mouse);
cv::imshow("LENNA", img);
cv::waitKey();
cv::destroyAllWindows();
}
void on_mouse(int mouse_event, int mouse_x, int mouse_y, int flag, void*)
{
switch (mouse_event)
{
case cv::EVENT_LBUTTONDOWN:
pt_old = cv::Point(mouse_x, mouse_y);
std::cout << "EVENT_LBUTTONDOWN " << "x : " << mouse_x << " , " << "y : " << mouse_y << std::endl;
break;
case cv::EVENT_LBUTTONUP:
std::cout << "EVENT_LBUTTONUP " << "x : " << mouse_x << " , " << "y : " << mouse_y << std::endl;
break;
case cv::EVENT_MOUSEMOVE:
if (flag & cv::EVENT_FLAG_LBUTTON)
{
cv::line(img, pt_old, cv::Point(mouse_x, mouse_y), cv::Scalar(255, 0, 0), 2);
cv::imshow("LENNA", img);
pt_old = cv::Point(mouse_x, mouse_y);
}
break;
}
}<compile 결과>

<trackbar_event.cpp>
#pragma once
#include <opencv2/opencv.hpp>
static void on_level_changed(int, void*);
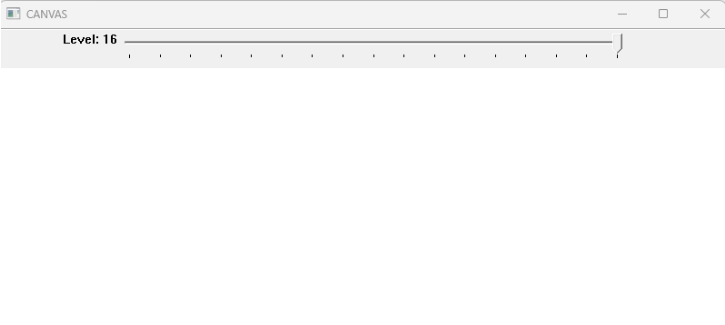
void trackbar_event()
{
cv::Mat canvas(800, 800, CV_8UC1);
cv::namedWindow("CANVAS");
cv::createTrackbar("Level", "CANVAS", nullptr, 16, on_level_changed, (void*)&canvas);
cv::imshow("CANVAS", canvas);
cv::waitKey();
cv::destroyAllWindows();
}
void on_level_changed(int position, void* userdata)
{
cv::Mat img = *(static_cast<cv::Mat*>(userdata));
img.setTo(position * 16);
cv::imshow("CANVAS", img); // updating
}
<compile 결과>
트랙바를 오른쪽으로 드래그하면 점점 밝기가 밝아진다


<mask_setTo.cpp>
#pragma once
#include <opencv2/opencv.hpp>
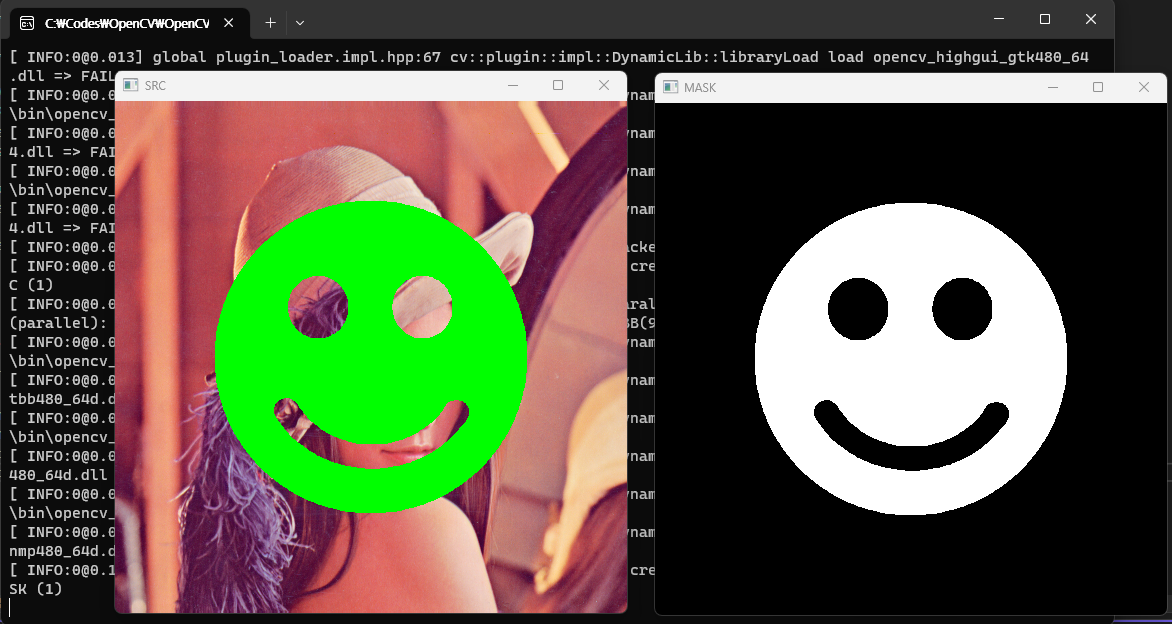
void mask_setTo()
{
cv::Mat src = cv::imread("lenna.bmp");
cv::Mat mask = cv::imread("mask_smile.bmp", cv::IMREAD_GRAYSCALE);
if (src.empty() or mask.empty()) return;
src.setTo(cv::Scalar(0, 255, 0), mask);
cv::imshow("SRC", src);
cv::imshow("MASK", mask);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>
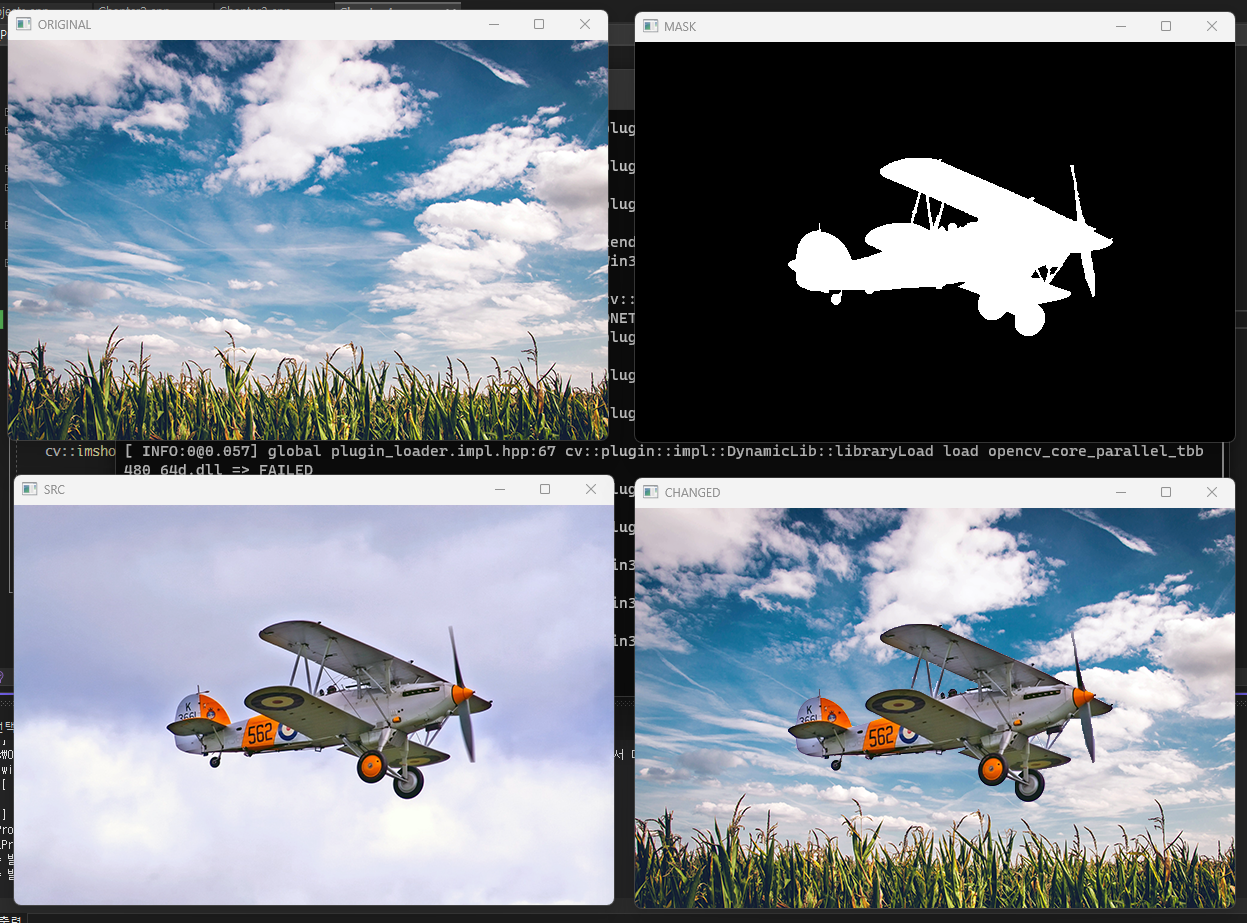
<mask_copyTo.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void mask_copyTo()
{
cv::Mat src = cv::imread("airplane.bmp");
cv::Mat mask = cv::imread("mask_plane.bmp", cv::IMREAD_GRAYSCALE);
cv::Mat dst = cv::imread("field.bmp");
if (src.empty() or mask.empty() or dst.empty()) return;
cv::imshow("ORIGINAL", dst);
cv::imshow("SRC", src);
cv::imshow("MASK", mask);
src.copyTo(dst, mask);
cv::imshow("CHANGED", dst);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>
<time_inverse.cpp>
#pragma once
#include <opencv2/opencv.hpp>
void time_inverse()
{
cv::Mat img = cv::imread("lenna.bmp", cv::IMREAD_GRAYSCALE);
if (img.empty()) return;
cv::Mat dst(img.rows, img.cols, img.type());
cv::TickMeter tick;
tick.start();
for (int i = 0; i < img.rows; ++i)
{
for (int j = 0; j < img.cols; ++j)
{
dst.at<uchar>(i, j) = 255 - img.at<uchar>(i, j);
}
}
tick.stop();
std::cout << "걸린 시간 : " << tick.getTimeSec() << "초." << std::endl;
cv::imshow("IMG", img);
cv::imshow("DST", dst);
cv::waitKey();
cv::destroyAllWindows();
}<compile 결과>

<useful_function.cpp>
#pragma once
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
void useful_function()
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
cout << static_cast<int>(sum(src)[0]) << endl; // 픽셀 값들의 합
cout << static_cast<int>(mean(src)[0]) << endl; // 픽셀 값들의 평균
double min_value = 0.0;
double max_value = 0.0;
Point min_point;
Point max_point;
cout << "Min : " << min_value << " , " << "Max : " << max_value << endl;
minMaxLoc(src, &min_value, &max_value, &min_point, &max_point);
cout << "Min : " << min_value << " , " << "Max : " << max_value << endl;
cout << "Min Position X : " << min_point.x << " , " << "Min Position Y : " << min_point.y << endl;
cout << "Max Position X : " << max_point.x << " , " << "Max Position Y : " << max_point.y << endl;
}<compile 결과>

'OpenCV' 카테고리의 다른 글
| Chapter7 : 필터링 (0) | 2023.09.14 |
|---|---|
| Chapter6 : 영상의 산술 및 논리 연산 (0) | 2023.09.14 |
| Chapter5 : 영상의 밝기와 명암비 조절 (0) | 2023.09.14 |
| Chapter3 : Point, Size, Rect, Range, Mat 클래스 (0) | 2023.09.12 |
| Chapter2 : 이미지 불러오기 (0) | 2023.09.12 |
'OpenCV' Related Articles
more



