
- 분류 전체보기 (423)

- C (66)
- C++ (45)
- Python (28)
- OpenCV (12)
- Arduino (21)
- Raspberry Pi (11)
- TCP IP 소켓 프로그래밍 (13)
- SQL (6)
- 대학교 2학년 1학기 (12)
- 대학교 2학년 2학기 (0)
- 대학교 3학년 1학기 (8)
- 대학교 3학년 2학기 (0)
- 대학교 4학년 1학기 (16)
- (두산로보틱스) ROKEY 부트 캠프 (113)
- (Telechips) AI 시스템 반도체 SW 개.. (71)
- C (9)
- C언어 ROS 문제 (1)
- C언어, Python, C++ 과제 문제 (0)
- ATmega128A 마이크로컨트롤러 프로그래밍 (12)
- ATmega128A mini Project (2)
- STM32CubeIDE (11)
- STM32CubeIDE mini Project (2)
- 비전과AI머신러닝 (17)
- MySQL & Visual Studio C 연동 .. (1)
- MFC Application (1)
- 비전과AI머신러닝 mini Project (1)
- SoC 시스템 반도체를 위한 온디바이스 AI (11)
- SoC 시스템 반도체를 위한 임베디드 리눅스 (3)
- OPIC 공부 (1)
Recent Posts
printf("ho_tari\n");
[주행] Fulfillment 가상 서비스 환경 실습 3일차 본문
2024.11.21
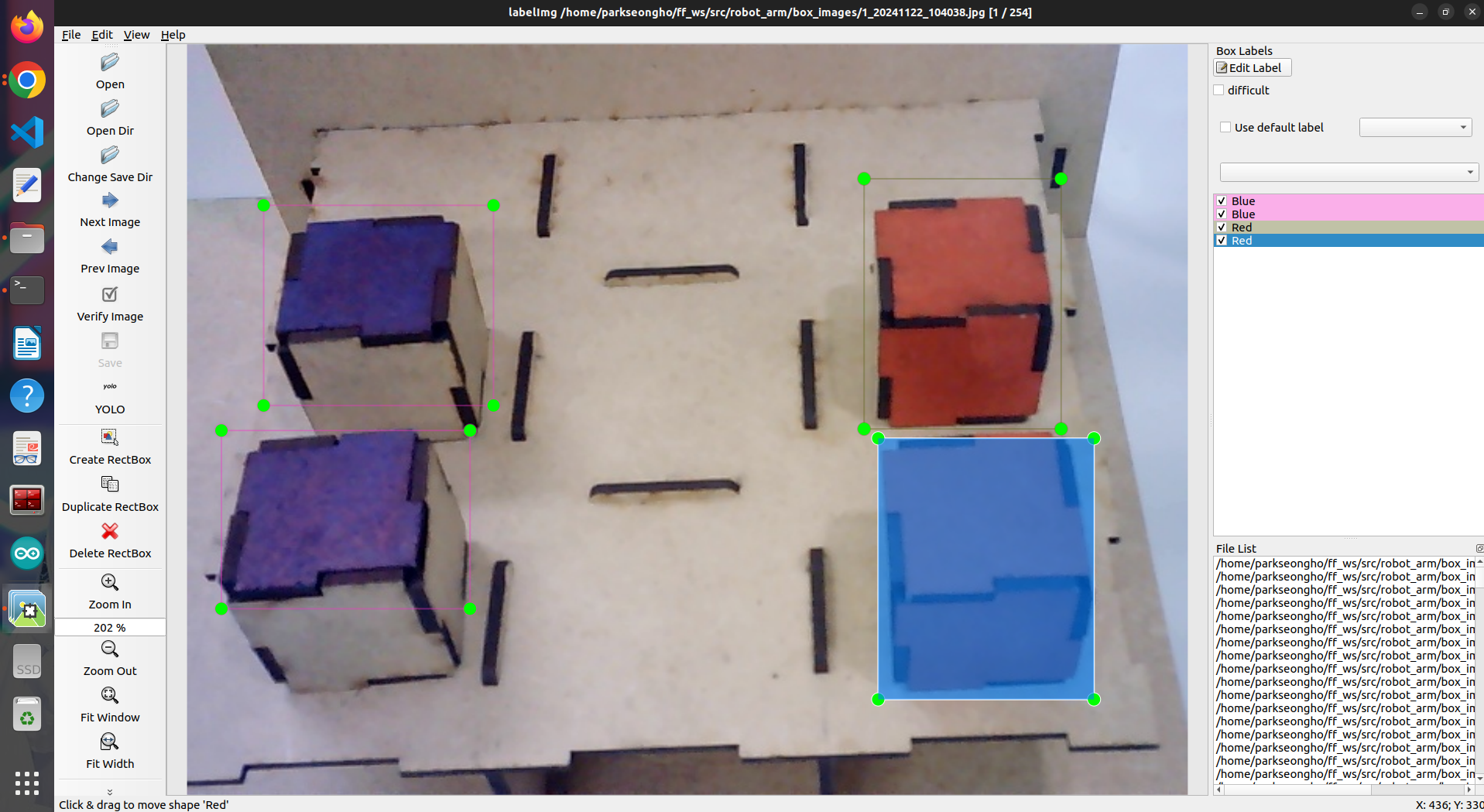
프로젝트 3일차에는 ARUCO 마커를 여러개 인식했을 때 그 마커들 사이의 거리 혹은 각도를 계산하여 출력하도록 하였다.

또한, 이제 manipulator-x의 로봇팔이 자율적으로 동작할 수 있도록 학습시키기 위해 필요한 데이터들을 수집하고 라벨링하였다.

'(두산로보틱스) ROKEY 부트 캠프 > 실무 프로젝트' 카테고리의 다른 글
| [주행] Fulfillment 가상 서비스 환경 실습 5일차 (0) | 2024.11.26 |
|---|---|
| [주행] Fulfillment 가상 서비스 환경 실습 4일차 (0) | 2024.11.26 |
| [주행] Fulfillment 가상 서비스 환경 실습 2일차 (0) | 2024.11.21 |
| [주행] Fulfillment 가상 서비스 환경 실습 1일차 (0) | 2024.11.21 |
| [주행] 서비스(음식배달,정찰경찰 등) 로봇 및 관제 시스템 개발 5일차 (0) | 2024.11.18 |
'(두산로보틱스) ROKEY 부트 캠프/실무 프로젝트' Related Articles
more


