

printf("ho_tari\n");
2일차 본문
2025.03.26
오늘의 학습 목표
1. 과제 review
2. LED/BUTTON Control
3. HAL function → Direct MemoryAccess 변환
4. Debugger 사용법
5. ST_LINK Utility
DMA_RISC_CISC_WatchDog_AHB_APB_박성호.pdf
1.30MB
데이터시트


LED CONTROL
<main.c>
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2025 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "extern.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
led_main();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
// HAL_Delay(500);
HAL_GPIO_WritePin(GPIOB, 0xff, 1);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOB, 0xff, 0);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 16;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD2_Pin */
GPIO_InitStruct.Pin = LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : PB0 PB1 PB2 PB3
PB4 PB5 PB6 PB7 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
<led.c>
#include "led.h"
void led_main(void)
{
while(1)
{
// led_all_on();
// HAL_Delay(50);
// led_all_off();
// HAL_Delay(50);
shift_left_led_on();
shift_right_led_on();
shift_left_keep_ledon();
shift_right_keep_ledon();
flower_on();
flower_off();
}
}
void led_all_on(void)
{
// HAL_GPIO_WritePin(GPIOB, 0xff, 1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 1);
}
void led_all_off(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 0);
}
void shift_left_led_on(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
}
void shift_right_led_on(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 7; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
}
void shift_left_keep_ledon(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
}
void shift_right_keep_ledon(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 7; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
}
void flower_on(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 4; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i] | ledpins[7 - i], 1);
HAL_Delay(150);
}
led_all_off();
HAL_Delay(100);
}
void flower_off(void)
{
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
led_all_on();
HAL_Delay(100);
for(int i = 0; i < 4; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i] | ledpins[7 - i], 0);
HAL_Delay(150);
}
HAL_Delay(100);
}
<실행 결과>
https://youtube.com/shorts/QXG3OIcTGuA



주소값 사용
<led.c>
void led_all_on(void)
{
#if 1
// printf("int %d\n", sizeof(int)); // 4로 찍히는지 확인
*(unsigned int *)0x40020414 = 0xff;
#else // original
// HAL_GPIO_WritePin(GPIOB, 0xff, 1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 1);
#endif
}
void led_all_off(void)
{
#if 1
// printf("int %d\n", sizeof(int)); // 4로 찍히는지 확인
*(unsigned int *)0x40020414 = 0x00;
#else
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 0);
#endif
}

LED CONTROL with DMA
<led.c>
#include "led.h"
void led_main(void)
{
while(1)
{
led_all_on();
HAL_Delay(500);
led_all_off();
HAL_Delay(500);
shift_left_led_on();
shift_right_led_on();
shift_left_keep_ledon();
shift_right_keep_ledon();
flower_on();
flower_off();
}
}
void led_all_on(void)
{
#if 1
// printf("int %d\n", sizeof(int)); // 4로 찍히는지 확인
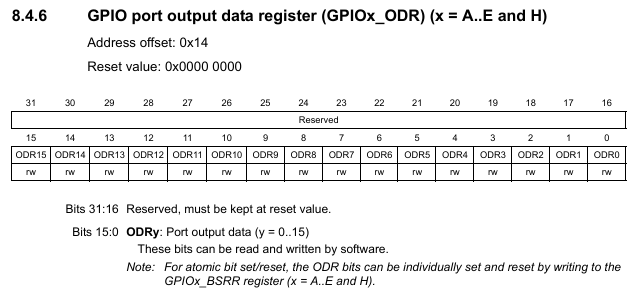
*(unsigned int *)GPIOB_ODR = 0xff;
#else // original
// HAL_GPIO_WritePin(GPIOB, 0xff, 1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 1);
#endif
}
void led_all_off(void)
{
#if 1
// printf("int %d\n", sizeof(int)); // 4로 찍히는지 확인
*(unsigned int *)GPIOB_ODR = 0x00;
#else
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6 | GPIO_PIN_7, 0);
#endif
}
void shift_left_led_on(void)
{
#if 1
for(int i = 0; i < 8; i++)
{
*(unsigned int*)GPIOB_ODR = 0x01 << i;
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
#endif
}
void shift_right_led_on(void)
{
#if 1
for(int i = 0; i < 8; i++)
{
*(unsigned int*)GPIOB_ODR = 0x80 >> i;
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 7; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
led_all_off();
}
HAL_Delay(100);
#endif
}
void shift_left_keep_ledon(void)
{
#if 1
for(int i = 0; i < 8; i++)
{
*(unsigned int*)GPIOB_ODR |= 0x01 << i;
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
#endif
}
void shift_right_keep_ledon(void)
{
#if 1
for(int i = 0; i < 8; i++)
{
*(unsigned int*)GPIOB_ODR |= 0x80 >> i;
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 7; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i], 1);
HAL_Delay(100);
}
led_all_off();
HAL_Delay(100);
#endif
}
void flower_on(void)
{
#if 1
for(int i = 0; i < 4; i++)
{
*(unsigned int*)GPIOB_ODR |= 0x10 << i | 0x08 >> i;
HAL_Delay(150);
}
led_all_off();
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
for(int i = 4; i >= 0; i--)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i] | ledpins[7 - i], 1);
HAL_Delay(150);
}
led_all_off();
HAL_Delay(100);
#endif
}
void flower_off(void)
{
#if 1
led_all_on();
HAL_Delay(100);
for(int i = 4; i >= 0; i--)
{
*(unsigned int*)GPIOB_ODR &= ~(0x10 << i | 0x08 >> i);
HAL_Delay(150);
}
led_all_off();
HAL_Delay(100);
#else
uint16_t ledpins[8] = {
GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3,
GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7
};
led_all_on();
HAL_Delay(100);
for(int i = 0; i < 4; i++)
{
HAL_GPIO_WritePin(GPIOB, ledpins[i] | ledpins[7 - i], 0);
HAL_Delay(150);
}
HAL_Delay(100);
#endif
}
<실행 결과>
https://youtube.com/shorts/Nd3inZdC3Wk
BUTTON TOGGLE with DMA (PUPDR)

<button.c>
/*
* button.c
*
* Created on: Mar 26, 2025
* Author: microsoft
*/
#include "button.h"
void button_led_toggle_test(void);
int get_button(GPIO_TypeDef *GPIO, int GPIO_Pin, int button_num);
void button_led_toggle_test(void)
{
*(unsigned int *)GPIOC_PUPDR |= 0b01010101 | 0b01 << 26;
// 버튼을 한 번 눌렀다 떼면 led가 toggle되도록 code 구현
if(get_button(GPIOC, GPIO_PIN_0, BTN0) == BUTTON_PRESS)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_0);
}
if(get_button(GPIOC, GPIO_PIN_1, BTN1) == BUTTON_PRESS)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1);
}
if(get_button(GPIOC, GPIO_PIN_2, BTN2) == BUTTON_PRESS)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_2);
}
if(get_button(GPIOC, GPIO_PIN_3, BTN3) == BUTTON_PRESS)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3);
}
if(get_button(GPIOC, GPIO_PIN_13, BTN4) == BUTTON_PRESS) // demo'bd
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
}
}
int get_button(GPIO_TypeDef *GPIO, int GPIO_Pin, int button_num)
{
static unsigned char button_status[BUTTON_NUMBER] =
{BUTTON_RELEASE,BUTTON_RELEASE,BUTTON_RELEASE,BUTTON_RELEASE, BUTTON_RELEASE};
// 지역 변수에 static을 쓰면 전역 변수처럼 함수를 빠져 나갔다 다시 들어 와도 값을 유지 한다.
int current_state;
// currtn_state = HAL_GPIO_ReadPin(GPIO, GPIO_Pin); // 버튼을 읽는다.
current_state = *(unsigned int*)GPIOC_IDR;
if (!(current_state & GPIO_Pin) && button_status[button_num] == BUTTON_RELEASE) // 버튼이 처음 눌려진 noise high
{
HAL_Delay(60); // noise가 지나가기를 기다린다.
button_status[button_num] = BUTTON_PRESS; // noise가 지나간 상태의 High 상태
return BUTTON_RELEASE; // 아직은 완전히 눌렸다 떼어진 상태가 아니다.
}
else if ((current_state & GPIO_Pin) && button_status[button_num] == BUTTON_PRESS)
{
HAL_Delay(60);
button_status[button_num] = BUTTON_RELEASE; // 다음 버튼 체크를 위해서 초기화
return BUTTON_PRESS; // 완전히 1번 눌렸다 떼어진 상태로 인정
}
return BUTTON_RELEASE; // 버튼이 open상태
}
<button.h>
/*
* button.h
*
* Created on: Mar 26, 2025
* Author: microsoft
*/
#ifndef INC_BUTTON_H_
#define INC_BUTTON_H_
#include "main.h"
#define GPIOC_IDR 0x40020810
#define GPIOC_PUPDR 0x4002080C
#define BTN0 0 // PC0
#define BTN1 1 // PC1
#define BTN2 2 // PC2
#define BTN3 3 // PC3
#define BTN4 4 // PC13 demo'bd
#define BUTTON_NUMBER 5
#define BUTTON_PRESS 0 // active low
#define BUTTON_RELEASE 1 // button을 뗀 상태
#endif /* INC_BUTTON_H_ */
<실행 결과>
https://youtube.com/shorts/9W21vMC4UKQ
'(Telechips) AI 시스템 반도체 SW 개발자 교육 > STM32CubeIDE' 카테고리의 다른 글
| 6일차 (0) | 2025.04.01 |
|---|---|
| 5일차 (0) | 2025.03.31 |
| 4일차 (0) | 2025.03.28 |
| 3일차 (0) | 2025.03.27 |
| 1일차 (0) | 2025.03.25 |
'(Telechips) AI 시스템 반도체 SW 개발자 교육/STM32CubeIDE' Related Articles
more



