(두산로보틱스) ROKEY 부트 캠프/실무 프로젝트
[주행] Fulfillment 가상 서비스 환경 실습 2일차
호타리
2024. 11. 21. 09:46
2024.11.20
2일차에는 컨베이어 벨트의 구동과 ARUCO를 이용한 마커 인식을 구현해보는 시간을 가졌다.
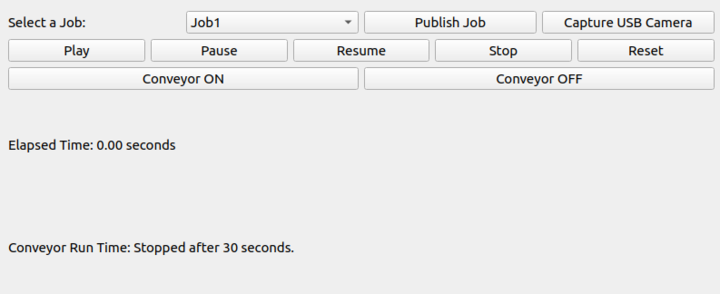
기존에 만들었던 GUI에서 컨베이어 벨트와 연결된 아두이노와 시리얼 통신을 하여 버튼을 활용하여 컨베이어 벨트의 동작을 제어하도록 설계하였다.
https://youtube.com/shorts/JcfV0yIJ8PM

ARUCO를 활용하여 마커를 인식해 좌표축을 띄우고 카메라와의 거리를 측정하여 출력해 보았다.
